THE BRIGHT PRINCIPLE
Prevent Ringing
Introduction
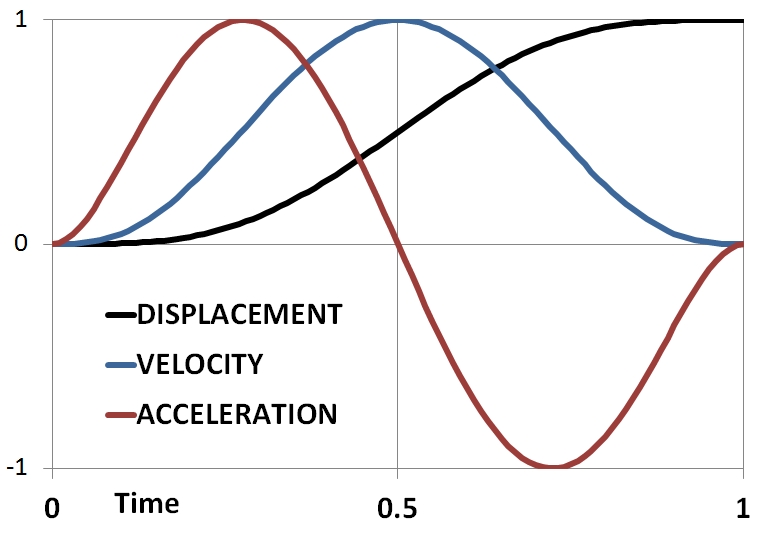 The figure plots calculated curves for a non-ringing fuel injector needle transient. Both displacement and time start at 0 and end at 1. Displacement and time are normalized, meaning they can be any displacement in any time, subject to design limits. To get displacement, the needle requires velocity and acceleration, also normalized.
The figure plots calculated curves for a non-ringing fuel injector needle transient. Both displacement and time start at 0 and end at 1. Displacement and time are normalized, meaning they can be any displacement in any time, subject to design limits. To get displacement, the needle requires velocity and acceleration, also normalized.
The zero slopes on each end of each curve show they are not ringing, the Bright Principle in action. The terfenol-d actuator continuously controls the balance of forces across the needle, varying nozzle opening size without need of physical stops.
Background
Dynamic systems direct energy to do useful things. Energy must enter and exit the dynamic system for it to do useful things. Entry and exit frequently excite "ringing," a phenomenon named after bells that ring after being struck.
QCW discovered how to quickly energize a dynamic system without ringing by using the Bright Principle. This is like striking a bell without that bell ringing or plucking a guitar string without that string vibrating (ringing).
In many applications, undesirable ringing accompanies the desired dynamic system operation. Use the Bright Principle to eliminate undesirable ringing by not creating it.
Preliminaries
- Energy. Energy occurs in pairs of cause and effect:
- Electrical: voltage and charge
- Magnetic: field and flux
- Mechanical: distance and force
- Hydraulic: pressure and volume
- Free Response. Ringing is the free response of a dynamic system. Without the Bright Principle, once a system begins to be energized any excess energy "sloshes around" until it dissipates. Various patches and filters long known in the art only partially mask and suppress the free response of dynamic systems caused by this sloshing. They can never be completely effective because they only treat the effect instead of its cause.
- Forced Response. QCW discovered the Bright Principle for shaping the time rate at which energy quickly enters to match the dynamic system without excess sloshing. This is like striking the bell with a specified force over time to simply distort and/or undistort the bell without exciting it to ring. The specified force over time is the forcing function and the non-ringing distortion of the bell is its forced response. The forcing function is customized using the Bright Principle to exactly match the bell or other dynamic system.
- Transient. Flows of energy into and out of a dynamic system do not match.
- Steady State. Flows of energy into and out of a dynamic system match.
Problem Statement
Traditional dynamic system mathematical modeling yields the traditional damped sinusoid solution. This has been adequate for steady-state operation of dynamic systems such as electrical transformers.
However, modeling can be improved for transient energizations and de-energizations of some dynamic systems, including
- Varying the time rate at which an injector injects fuel into a diesel engine, the case that was originally solved. That is, tailoring nozzle opening size at any point in an injection event, rapidly and without ringing.
- Seismic and Medical Pulse-Echo Imaging
- Variable Frequency Drives
- Aircraft Hydraulic Flight Controls
Example Solved by Discovery of Bright Principle
In the case of a diesel fuel injector, the mechanical transient displacement (lift) of the injector needle determines the start and end of injection. The needle is presently operated by porting high pressure fuel to one side or the other of the needle, the porting being accomplished by a small electrical solenoid valve. With this method, the needle is either stopped at the closed or open positions or traveling ballistically between closed and open during its transients.
The solenoid valve and porting create needle delays and control only one fuel flow rate, the rate when the needle is fully open. Only one fuel flow rate can match the rate at which the engine turns heat into work at only one specific condition, the existing compromise. Other than no or full flow, the rate at which fuel is injected cannot be modulated. By its effects on combustion, needle lift affects engine power, economy, emissions, and fuel flexibility.
QCW began an effort to reduce in-cylinder emissions generation by remedying the vintage 1913 solenoid and porting deficiencies of lifting a needle. By their nature, solenoids are either fast and weak or slow and strong. Improving injection requires fast and strong. To take advantage of the durable high energy density of magnetostrictive terfenol-d, an actuator was designed, built, and tested.
The new actuator was originally meant to only replace the solenoid, to speed up the porting. The potential of this first actuator to very quickly and directly lift the needle the required distance, avoiding porting altogether, was immediately apparent in the first few tests.
Equally apparent was the need to accomplish the needle lift transient without ringing. Traditional modeling cannot accurately predict non-ringing design and operation parameters without tedious empirical iteration. Traditional modeling tends to cause overshoot and ringing when attempting a fast transient. Injector needle overshoot and ringing would be reflected by the undesired variation in the rate of fuel injection, causing engine operation problems. The amount of empirical iteration needed to accomodate lift transients with constantly changing engine load and speed became unworkable.
The focus then shifted to revising the forcing function, work that discovered and proved the Bright Principle. The Bright Principle is a forced response solution method that avoids masking and suppression of the free response of a dynamic system. The Bright Principle improves on traditional modeling by including all energy components and using polynomials instead of sinusoids. A world of lift profile possibilities has now been opened by making needle lift a scale of actuator electric input current.
Polynomial Solution
Polynomials unshackle the limitations of sinusoids. Boundary condition polarities and magnitudes may be set as desired for the chosen independent variable. For example, the injector needle velocity and acceleration can each be set to zero at both the beginning and end of a lift transient, avoiding overshoot and ringing no matter the lift or duration of the transient. The needle stops by Bright Principle input energy control through the set boundary conditions. Match the degree of the polynomial to the number of boundary conditons to obtain a unique solution. Test proof of the Bright Principle has been obtained and published.
Summary of the Example Solved Case
To operate a very fast and continuously-variable-injection-rate diesel fuel injector, an underdamped spring-mass terfenol-d actuator directly lifts the needle. The terfenol-d acts like a variable-stiffness spring. The dynamic system being modeled is the combined actuator and needle, which together move as a scale of actuator input electric current. As a two-port energy in and energy out electromechanical actuator, including all energy components encompasses force, distance, voltage, and charge. Any one of these components can be selected as the independent variable and the Bright Principle will solve for the remaining three dependent variables.
Application
Although developed and tested using an electromechanical actuator for a diesel fuel injector needle, the general-purpose Bright Principle applies to all dynamic systems. Use of the Bright Principle eliminates the need for the trial-and-error computerized empirical approach to a non-ringing forcing function. The advantages of a closed-form solution are available, particularly those that aid in improving dynamic system design, operation, and cost.